
_edited.png)
.png)

Advantages
The automatic target recognition and tracking platform is designed to hit military vehicles and infantry in the environment, which has different electronic warfare equipment, in the cases when the control signals exchange and video transmission are not possible at the final phase of the flight (500-1000m distance to the target).

ㅤㅤㅤㅤ FPVs, aircraft type UAVs, loitering munitions, cruise missiles, guided bombs
ㅤ - Reverse engineering protection implemented specifically for the case when the drone is captured by the adversary - Per-device license management
ㅤ Over 90% success rate in environments with electronic warfare equipment when the tracking starts at 500 meters distance
.png)
.png)
ㅤ Can be deployed by unexperienced UAV pilots by turning on the tracker after take off and adjusting the tracking point during the flight
ㅤ Reference hardware cost is as low as $200 per unit (software license excluded)
ㅤ with different flight controllers and autopilots: - F405, H743, others - Ardupilot, Betaflight, iNav
ㅤ Software can be ported to any hardware platform, which meets performance requirements
.png)
.png)
.png)

Carriers
The system can be mounted on various carriers:
- FPV drones 7"..10"
- Aircraft-type UAVs
- Loitering munitions similar to Russia’s “Lancet” drones
- Cruise missiles / guided bombs

The system can be mounted on various carriers:
- "Khrushch" aircraft type UAVs
- Variety of 7" and 10" FPV drones
The system can be mounted on various carriers:
- Ardupilot
- Betaflight
- iNav
.png)
Specifications
.png)
Target capturing and tracking distance: 8mm lens / 50° FOV: up to 1000m
Target speed: depends on carrier drone capabilities. For a basic 10" drone, target speed can be up to 60km/h for both chase and head-on approaches.
Max crosswind: 12kt (6 m/s)
Tracker FPS: 30
Training dataset: proprietary dataset of 150,000+ labeled images
Tracker precision (on training dataset): 0.95
Detection models:
- military vehicles (tanks, personnel carriers, SAMs, trucks)
- military and civilian cars, vans, trucks
- flying targets
- infantry
Detector performance: 10 FPS
Image resolution: 640x480 (zoomed image area: 1440x1080)
Weight: <150g including camera hardware and lens


Pilot User
ㅤ Interface:
State:
.png)


Field testing video
Click below to watch the video

The system can be ported to a different hardware platform within 6-9 weeks.
Adaptation of the existing HW to a new UAV model: 3-4 weeks for setup and field testing
Hardware platform
.png)
Raspberry Pi 4b

RP2040

RPi Global Shutter Camera

Coral USB stick
(for target detection)

.png)
Why do we need a detector?
Currently, the detector is used to ensure the target hit in the case when for a substantial period of time the line-of-sight has been lost or the target is hidden in smoke.
Even without a detector, our computer vision algorithms and logic incorporated in the tracker module can still keep hold of the target in case of brief line-of-sight losses.
In the future revisions the detector will be used to automatically select, lock, and hit a target of the predefined category without pilot inputs.

Control and tracking algorithms are being tested in flight simulators (Uncrashed, XPlane) because they allow:
- Specify UAV parameters and perform initial PIDs tuning before field testing
- Algorithms testing for the scenarios when the targets are moving
- Algorithms testing in different wind conditions
Simulation
.png)

The platform development is being done in close cooperation with the 48th combat unit of AFU, who developed the aircraft type UAV "Khrushch", and with a large drone pilot school.
Team
_edited.png)
.png)
Project
Lead/acting CEO
20+ years in IT. Successful due-diligence process and exit with the unicorn company in 2018.
Built and managed R&D centers in Ukraine with a staff of 1000+ team members. Aviation geek, holder of CPL(Aircraft) pilot license.
.png)
Computer Vision Engineer
Technical geek, expert in detector algorithms
.png)
Embedded Engineers
Experts in full-cycle HW development and UAV control algorithms
.png)
CTO
Working on PhD on drone-related subject. Expert in mobile neural network architectures, tracker and detector algorithms
.png)
Data Processing Engineers
Experts in building and organizing datasets, semi-automatic annotation
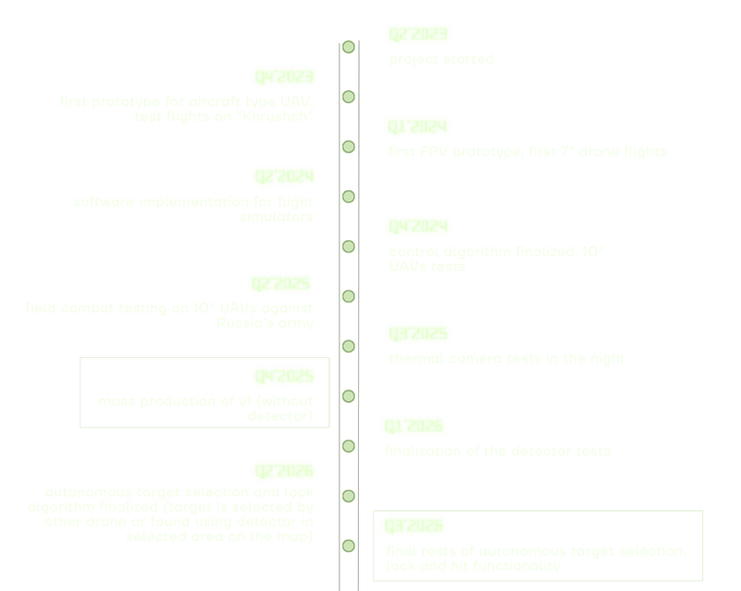
Timeline

.png)